應用於人群環繞場所智慧型自走載具之感測、導航技術開發與加速晶片設計
Sensing/Navigation Technology Developments and Accelerator Chip Designs for Intelligent Autonomous Movers Used in People Rich Environments
 計畫團隊成員 Members
計畫團隊成員 Members
黃穎聰教授
Prof. Yin-Tsung Hwang
國立中興大學電機系
EE Dept., NCHU
陳冠宏副教授
Assoc. Prof.
Kuan-Hung Chen
逢甲大學電子系
EE Dept., FCU

范志鵬教授
Prof. Chih-Peng Fan
國立中興大學電機系
EE Dept., NCHU

賴永康教授
Prof. Yeong-Kang Lai
國立中興大學電機系
EE Dept., NCHU

吳崇賓副教授
Assoc. Prof.
Chung-Bin Wu
國立中興大學電機系
EE Dept., NCHU

林維亮副教授
Assoc. Prof.
Wei-Liang Lin
國立中興大學電機系
EE Dept., NCHU

林光浩副教授
Assoc. Prof.
Kuang-Hao Lin
國立虎尾科技大學電機系
EE Dept., NFU
Category
Autonomous Mover, Deep Learning Algorithms, AI Accelerator Chips, Cloud Control, Navigation & Path Planning
技術亮點
Technical Highlights
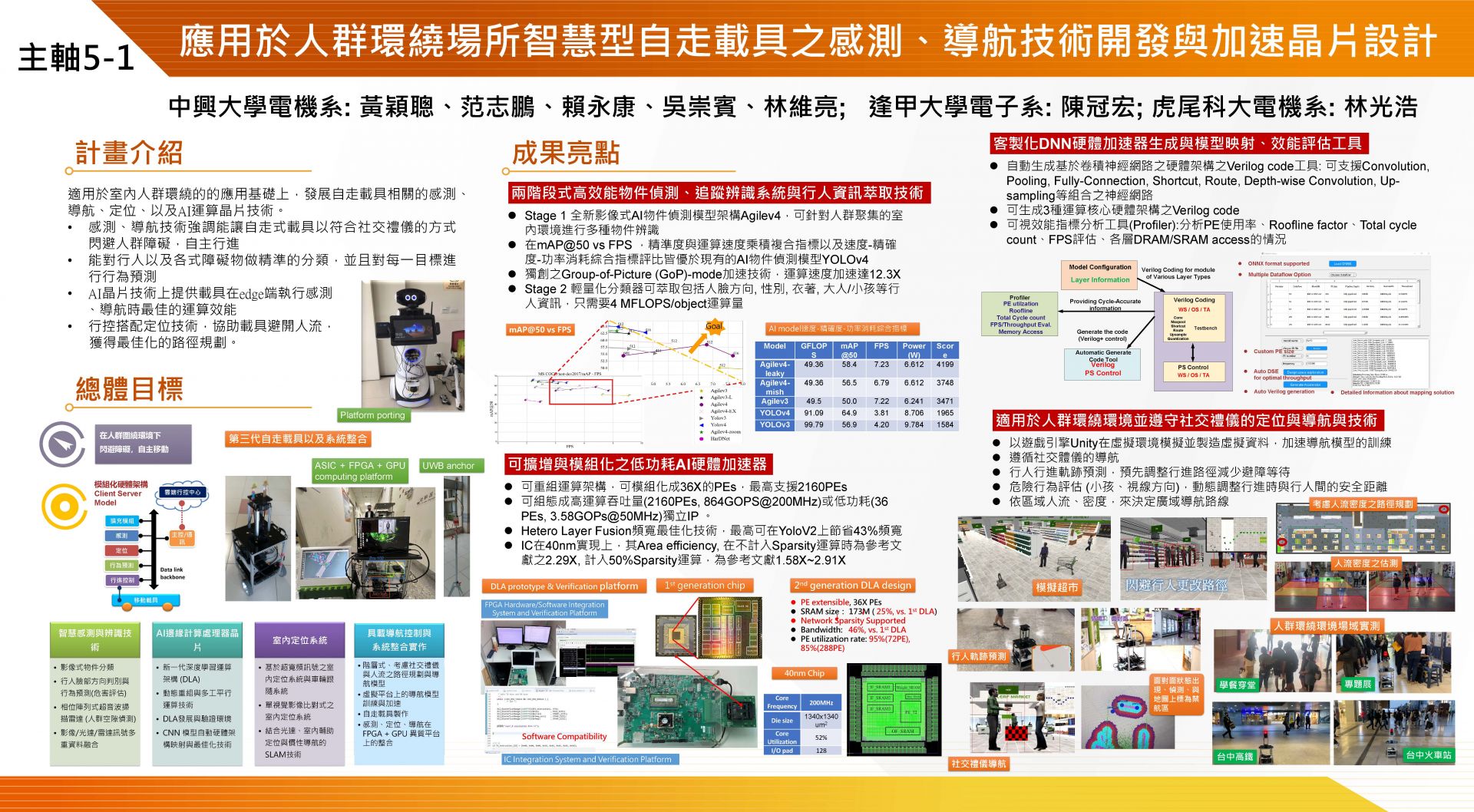
適用於⼈群環繞場所應用之智慧型自走載具關鍵技術與系統整合
低複雜度兩階段影像式物件感測技術,包括第一階段行人以及相關物件(購物車、嬰兒車、輪椅)辨識,第二階段行人進階資訊萃取(臉部方向、性別、小孩),以及⾏為預測功能
邊緣端的⾼效能低功耗AI晶片設計,運算效能可達4.73 TOPS/W,並提供CNN模型映射工具
納入人流方向與密度考量之廣域路徑規劃以及符合社交禮儀的區域導航技術
單視覺低標影像比對式室內定位技術,不需額外布建硬體,可達50cm定位精準度
適用於無人搬運車之UWB三角定位式自走載具跟隨技術
Key smart sensing and navigation technologies for autonomous vehicles operating in people rich environments
Low complexity, 2-stage image based sensing, including pedestrian and its surrounding object detection in stage 1, advanced pedestrian feature extraction in stage 2, and associated behavior prediction
High performance, low power edge AI chip design, supporting 4.73 TOPS/W computations, equipped with a CNN model mapping tool
Moving flow and people density aware global route planning plus social aware local navigation scheme
Monocular image based indoor positioning system via landmark matching, no hardware deployment cost, and with 50cm accuracy
UWB based triangulation scheme for automatic trailing